Summary
Inventors at Vanderbilt University have developed a robotic platform capable of guaranteeing a degree of agility, mechanical stability, power, reliability, comparable to a standard robotic platform for laparoscopic surgery, but characterized by a much lower invasiveness.
Addressed Need
In the field of robotic surgery there is strongly required the need of further reducing the invasiveness with respect to the current robots for robotic surgery, without jeopardizing the dexterity, power and degrees of freedom. A fundamental advantage of the proposed solution is to overcome the need of a mechanical continuity in the robotic platform between internal and external parts thereof, by using a magnetic link between a robotic arm outside the patient and a robotic arm inside the body cavity.
Technology Description
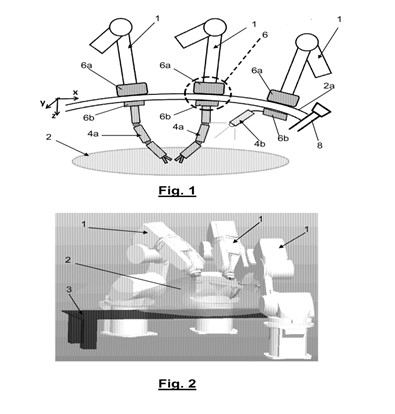
The robotic platform for mini-invasive surgery according to the present invention is based on the idea of considering the robot positioned within a body cavity, such as the abdomen of a patient, introduced through a single access port, as an extension of external robotic manipulators actuatable by an operator, also from a remote position.
An external robotic arm is used for supporting and possibly moving an internal auxiliary robotic arm carrying a vision system, while other external robotic arms are used for moving associated internal operative robotic arms.
The surgeon, from a console, is capable of controlling intuitively the entire kinematic chain constituted by an external robotic arm, trans-abdominal magnetic coupling and internal robotic arm, as if it were a single robotic arm.
Intellectual Property Status
Issued US patent No US9579163B2
“A magnetic levitation robotic camera for minimally invasive surgery”,
Surgical Endoscopy 2017